

![]()
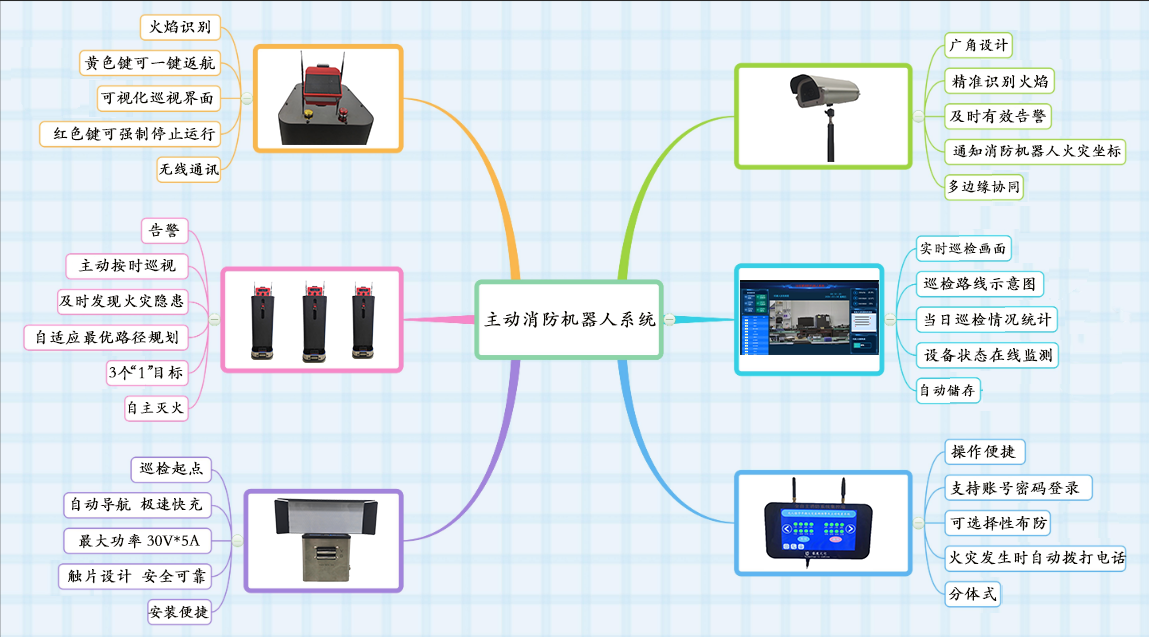
系统面向各类仓储库房、数据中心、博物馆、展馆、图书馆等无人值守场所。通过激光+结构光融合SLAM技术、深度相机环境重构技术、最优路径规划技术、多源感知融合定位技术、轻量化神经网络早期火灾识别技术、火点三维定位等技术实现早期火灾的识别预警与自主处置。机器人可工作于自动/手动巡检方式,完成入侵检测、火灾巡检、定制巡检等功能。
系统秉承“早发现、早预警、早处置”原则,可实现10000m2场景下3个“1”的目标(1秒钟内发现+1分钟内到达+1分钟内处置),将火灾扼杀在萌芽状态,最大限度减少生命和财产损害。
![]()
![]()
自动充电功能:
机器人可做到5小时快速充电,8小时不间断巡逻,12小时待机。当机器人巡视过程中处于低电量时,可自动导航寻找充电桩自动充电。
多方式建图功能:
机器人通过激光雷达扫描所要巡航的环境构建地图,建图过程中融合多种传感器提高建图的精度。巡视过程中,机器人通过激光雷达扫描到的周围环境特征与之前采集的地图进行匹配,结合融合后的里程计对机器人进行精确定位。技术人员也可以在web端创建地图和路径。
自主巡检功能:
可设置巡检开始时间、间隔时间、结束时间、巡航点、边缘摄像头通讯参数等。巡检状态下的机器人可以按照设定路线设定速度行进,并且在行进过程中时刻保持高度警备,随时发现火灾信息。经过科学规划的巡检路径,可以做到无死角的24小时不间断巡检,极大提高了工作效率并且减轻了工作人员和用人单位的负担。
主动灭火功能:
在机器人巡检过程中或者边缘摄像头发现火源时,系统主动拨打场地负责人电话,同时机器人快速到达火灾地点,自主选择灭火距离和喷射角度,启动灭火装置,主动灭火。
火情监测功能:
机器人在灭火后,通过热成像摄像头实时监控环境温度,若检测到超过设置阈值温度,则进行二次灭火,并反馈至系统软件后台。
![]()

![]()

|
|

关注我们
Copyright © 合肥零度光电科技股份有限公司 2025 All Rights Reserved
皖ICP备2021002498号-1
